
အကူးအပြောင်း အချိန်ပိုင်း လုပ်ဆောင်ခြင်း နိယာမ
တိုင်းတာခြင်းဆိုင်ရာမူရင်း-
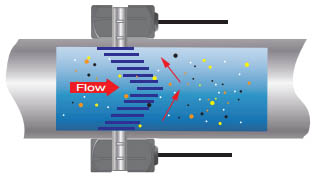
Transit-time Correlation Principle သည် ultrasonic signal ၏ ပျံသန်းချိန်ကို carrier medium ၏ flow velocity ဖြင့် သက်ရောက်မှုရှိသည်ဟူသောအချက်ကို အသုံးပြုထားသည်။စီးဆင်းနေသောမြစ်ကိုဖြတ်၍ ရေကူးသမားကဲ့သို့၊ ultrasonic အချက်ပြမှုတစ်ခုသည် ရေစီးကြောင်းထက် ရေအောက်ပိုင်းထက် နှေးကွေးစွာ စီးဆင်းနေပါသည်။
ကျွန်တော်တို့ရဲ့TF1100 ultrasonic စီးဆင်းမှုမီတာဤအကူးအပြောင်းအချိန်နိယာမအရ အလုပ်လုပ်သည်-
Vf = Kdt/TL
ဘယ်မှာလဲ-
VcFlow အလျင်
K: အဆက်မပြတ်
dt- လေယာဉ်ပျံသန်းချိန်ကွာခြားချက်
TL- ဒေါသကြီးသော ဖြတ်သန်းချိန်
flow meter သည် အလုပ်လုပ်သောအခါ၊ transducer နှစ်ခုသည် multi beam ဖြင့် ချဲ့ထွင်ထားသော ultrasonic အချက်ပြမှုများကို ထုတ်လွှင့်ပြီး ပထမပိုင်းတွင် ရေအောက်နှင့် အထက်သို့ ရွေ့လျားသွားသော multi beam များကို လက်ခံရရှိပါသည်။Ultra sound သည် အထက်ပိုင်းထက် ရေအောက်သို့ ပိုမြန်စွာ သွားလာသောကြောင့်၊ လေယာဉ်ပျံသန်းချိန် (dt) ကွာခြားမှု ရှိပါမည်။စီးဆင်းမှု ငြိမ်သွားသောအခါ အချိန်ကွာခြားချက် (dt) သည် သုညဖြစ်သည်။ထို့ကြောင့်၊ ရေအောက်နှင့် အထက်ပိုင်း ပျံသန်းမည့်အချိန်ကို ကျွန်ုပ်တို့ သိသရွေ့၊ အချိန်ကွာခြားချက်အား အောက်ပါပုံသေနည်းဖြင့် တွက်ချက်ပြီး flow velocity (Vf) ကို ရှာဖွေနိုင်ပါသည်။

V နည်းလမ်း
W နည်းလမ်း
Z နည်းလမ်း
Doppler လည်ပတ်မှုနိယာမ
ဟိDF6100စီးရီး flowmeter သည် ၎င်း၏ transmitting transducer မှ ultrasonic အသံကို ထုတ်လွှင့်ခြင်းဖြင့် လုပ်ဆောင်ပြီး၊ အရည်အတွင်းတွင် ဆိုင်းငံ့ထားသော အသုံးဝင်သော sonic reflectors များဖြင့် အသံကို လက်ခံရရှိသည့် transducer မှ မှတ်တမ်းတင်ထားသည်။sonic reflectors များသည် အသံထုတ်လွှင့်မှုလမ်းကြောင်းအတွင်း ရွေ့လျားနေပါက၊ အသံလှိုင်းများသည် transmission frequency မှ Doppler frequency (Doppler frequency) ဖြင့် ထင်ဟပ်မည်ဖြစ်ပါသည်။ကြိမ်နှုန်းပြောင်းလဲမှုသည် ရွေ့လျားနေသော အမှုန်အမွှား သို့မဟုတ် ပူဖောင်း၏အမြန်နှုန်းနှင့် တိုက်ရိုက်ဆက်စပ်နေမည်ဖြစ်သည်။ဤအကြိမ်ရေပြောင်းလဲမှုကို တူရိယာဖြင့် အဓိပ္ပာယ်ဖွင့်ဆိုပြီး အသုံးပြုသူသတ်မှတ်ထားသော တိုင်းတာမှုယူနစ်အမျိုးမျိုးသို့ ပြောင်းသည်။
100 micron ထက် ပိုကြီးသော အမှုန်များသည် အလျားလိုက် ရောင်ပြန်ဟပ်မှုကို ဖြစ်စေနိုင်လောက်အောင် ကြီးမားသော အမှုန်များ ရှိရပါမည်။
transducers များကို တပ်ဆင်သည့်အခါ၊ တပ်ဆင်သည့်နေရာသည် ဖြောင့်တန်းသော ပိုက်အရှည် လုံလောက်သော ရေစီးကြောင်းနှင့် အောက်ပိုင်းရှိရမည်။အများအားဖြင့်၊ အထက်ပိုင်းသည် 10D လိုအပ်ပြီး အောက်ပိုင်းတွင် D သည် ပိုက်အချင်းဖြစ်သည့် 5D ဖြောင့်ပိုက်အရှည် လိုအပ်သည်။
ဧရိယာအလျင် အလုပ်လုပ်မူ
DOF6000ဆက်တိုက်ဖွင့်ထားသော ချန်နယ်စီးဆင်းမှုမီတာသည် ရေအလျင်ကိုရှာဖွေရန် Continuous Mode Doppler ကိုအသုံးပြုသည်၊၊ ultrasonic signal သည် ရေစီးဆင်းမှုထဲသို့ ပို့လွှတ်ပြီး ရေစီးဆင်းမှုတွင် ဆိုင်းငံ့ထားသော အမှုန်များမှ ပြန်လာသော ပဲ့တင်သံ (reflections) ကို Doppler shift (အလျင်) ထုတ်ယူရန် ခွဲခြမ်းစိတ်ဖြာပြီး လက်ခံရရှိပါသည်။ဂီယာသည် ပြန်လာသော အချက်ပြလက်ခံမှုနှင့်အတူ ဆက်တိုက်နှင့် တပြိုင်နက်ဖြစ်သည်။
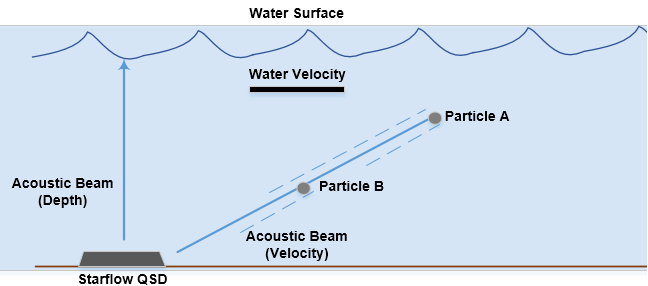
တိုင်းတာမှုစက်ဝန်းတစ်ခုအတွင်း Ultraflow QSD 6537 သည် စဉ်ဆက်မပြတ်အချက်ပြမှုကို ထုတ်လွှတ်ပြီး အလင်းတန်းတစ်လျှောက် နေရာတိုင်းနှင့် နေရာတိုင်းတွင် ဖြန့်ကျက်များမှ ပြန်လာသော အချက်ပြမှုများကို တိုင်းတာသည်။၎င်းတို့ကို သင့်လျော်သောဆိုက်များတွင် ချန်နယ်စီးဆင်းမှုအလျင်နှင့် ဆက်စပ်နိုင်သည့် ပျမ်းမျှအလျင်အဖြစ် ဖြေရှင်းထားသည်။
တူရိယာရှိ လက်ခံသူသည် ရောင်ပြန်ဟပ်သည့် အချက်ပြမှုများကို ထောက်လှမ်းပြီး ထိုအချက်ပြမှုများကို ဒစ်ဂျစ်တယ်အချက်ပြမှု လုပ်ဆောင်ခြင်းနည်းပညာများကို အသုံးပြု၍ ခွဲခြမ်းစိတ်ဖြာသည်။
ရေအနက် တိုင်းတာခြင်း - Ultrasonic
Depth တိုင်းတာခြင်းအတွက် Ultraflow QSD 6537 သည် Time-of-Flight (ToF) Ranging ကို အသုံးပြုသည်။၎င်းတွင် ရေမျက်နှာပြင်အထက်သို့ ultrasonic အချက်ပြမှု ဆက်တိုက်ထုတ်လွှင့်ခြင်းနှင့် တူရိယာမှ မျက်နှာပြင်မှ ပဲ့တင်သံကို လက်ခံရရှိမည့်အချိန်ကို တိုင်းတာခြင်းတို့ ပါဝင်ပါသည်။အကွာအဝေး (ရေအနက်) သည် ဖြတ်သန်းချိန်နှင့် ရေထဲတွင် အသံ၏အမြန်နှုန်း (အပူချိန်နှင့် သိပ်သည်းဆအတွက် ပြင်ဆင်ထားသည်) နှင့် အချိုးကျပါသည်။
အမြင့်ဆုံး ultrasonic အတိမ်အနက် တိုင်းတာမှုကို 5m ကန့်သတ်ထားသည်။
ရေအနက် တိုင်းတာခြင်း - ဖိအား
ရေတွင် အပျက်အစီးများ သို့မဟုတ် လေပူဖောင်းများ အများအပြားပါရှိသော နေရာများသည် ultrasonic အတိမ်အနက် တိုင်းတာခြင်းအတွက် မသင့်လျော်ပေ။ဤဆိုဒ်များသည် ရေအနက်ကိုဆုံးဖြတ်ရန် ဖိအားကိုအသုံးပြု၍ ပိုမိုကောင်းမွန်ပါသည်။
ဖိအားအခြေခံ အတိမ်အနက် တိုင်းတာခြင်း ကိရိယာသည် စီးဆင်းမှုလမ်းကြောင်း၏ ကြမ်းပြင်ပေါ်တွင် မတည်ရှိနိုင် သို့မဟုတ် ၎င်းကို အလျားလိုက် တပ်ဆင်၍မရသော နေရာများနှင့်လည်း သက်ဆိုင်ပါသည်။
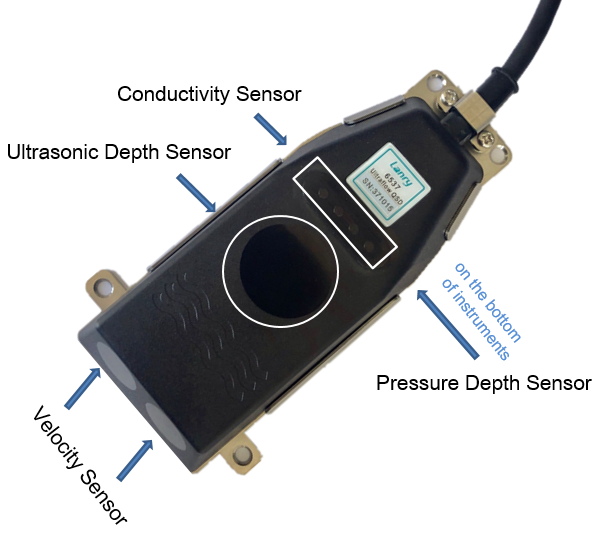
Ultraflow QSD 6537 ကို 2 bars absolute pressure sensor နဲ့ တပ်ဆင်ထားပါတယ်။အာရုံခံကိရိယာသည် တူရိယာ၏အောက်ခြေမျက်နှာစာတွင် တည်ရှိပြီး အပူချိန်လျော်ကြေးပေးသော ဒစ်ဂျစ်တယ်ဖိအားအာရုံခံဒြပ်စင်ကို အသုံးပြုသည်။
အတိမ်အနက် ဖိအားအာရုံခံကိရိယာများကို အသုံးပြုသည့်အခါတွင် လေထုဖိအားပြောင်းလဲမှုသည် ညွှန်ပြထားသည့် အတိမ်အနက်၌ အမှားအယွင်းများကို ဖြစ်စေသည်။၎င်းကို တိုင်းတာထားသော အတိမ်အနက်မှ လေထုဖိအားကို နုတ်ခြင်းဖြင့် ပြုပြင်သည်။၎င်းကိုလုပ်ဆောင်ရန် barometric ဖိအားအာရုံခံကိရိယာတစ်ခုလိုအပ်သည်။တိကျသော အတိမ်အနက် တိုင်းတာမှု အောင်မြင်ကြောင်း သေချာစေမည့် လေထုဖိအား ကွဲပြားမှုများကို အလိုအလျောက် လျော်ကြေးပေးမည့် Calculator DOF6000 တွင် ဖိအားလျော်ကြေးပေးသည့် module တစ်ခုကို တည်ဆောက်ထားပါသည်။၎င်းသည် Ultraflow QSD 6537 အား ဘားရိုမက်ထရစ်ဖိအားနှင့် ရေဦးခေါင်းအစား အမှန်တကယ် ရေအနက် (ဖိအား) ကို အစီရင်ခံနိုင်စေပါသည်။
အပူချိန်
ရေအပူချိန်ကို တိုင်းတာရန်အတွက် solid state temperature sensor ကိုအသုံးပြုသည်။ရေထဲတွင် အသံ၏အမြန်နှုန်းနှင့် ၎င်း၏စီးကူးနိုင်မှုသည် အပူချိန်ကြောင့် ထိခိုက်သည်။ဤပြောင်းလဲမှုအတွက် အလိုအလျောက် ပေးချေရန် ကိရိယာသည် တိုင်းတာထားသော အပူချိန်ကို အသုံးပြုသည်။
လျှပ်စစ်စီးကူးနိုင်စွမ်း (EC)
Ultraflow QSD 6537 တွင် ရေစီးကူးနိုင်မှုကို တိုင်းတာရန် စွမ်းရည်ပါရှိသည်။တိုင်းတာမှုပြုလုပ်ရန် linear four electrode configuration ကိုအသုံးပြုသည်။သေးငယ်သောလျှပ်စီးကြောင်းသည် ရေမှတဆင့်ဖြတ်သန်းပြီး ဤလျှပ်စီးကြောင်းမှဖြစ်ပေါ်လာသောဗို့အားကိုတိုင်းတာသည်။တူရိယာသည် မှန်ကန်မှုမရှိသော လျှပ်ကူးနိုင်စွမ်းကို တွက်ချက်ရန် ဤတန်ဖိုးများကို အသုံးပြုသည်။